Cooperative research
Autonomous design and implementation of high-level missions
- High complexity planning and implementation
- Fault-tolerant and reconfigurable control design solutions
- On-board sensors, multi-camera vision systems, communication devices, actuators, sensor fusion
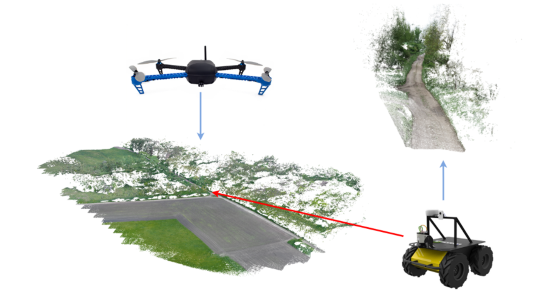
- Design of cooperative control of the joint movement of aircraft vehicles or aircraft and road vehicles.
- Agile cooperative control of drones
- Safe cooperation between ground vehicles and aircraft.