Kísérleti autonóm földi járművek
Teszt járművek
Alapkutatások eredményeinek gyakorlati validációja
- Modell-alapú járműirányítás
- Döntéshozás és tervezés
- MI-alapú megoldások
- Környezetérzékelés
- Kommunikáció
Kompetenciák bővítése
- Tesztjármű hardver- és szoftver
- Teszteljárások integrálása a kutatási folyamatba
Oktatás
Kooperáció
- Két egyforma tesztjármű
- Közös fejlesztések
Eredménykommunikáció
- Demonstrációk
- Kapcsolatteremtés az ipari partnerekkel
- Eredmények bemutatása a nagyközönségnek


Rendszer architektúra
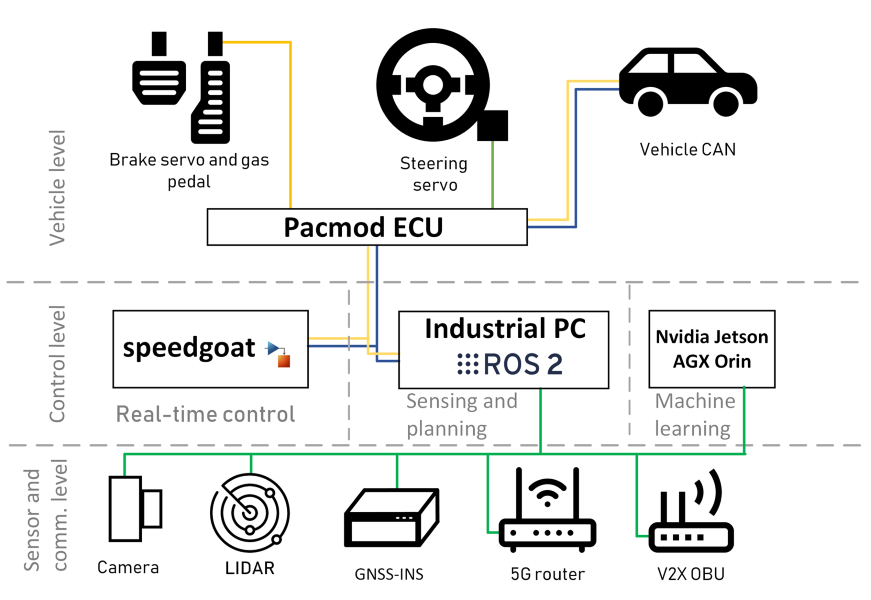
Szenzorok
Ouster OS1-64 lidar
- 64 csatorna
- Látószög: 45 fok függőleges, 360 fok vízszintes
- Vízszintes felbontás: 2048
- Hatótáv: 90 m (170 m)


Lucid Triton Kamera
- 3.2 MP
- Sony IMX265
- Fujinon 12mm f/1.6

Novatel GNSS-INS
- Novatel PwrPak7D
- RTK 1cm pozíció pontosság
- 0,08 fok állásszög pontosság
- USB, CAN, Ethernet
- Max. 200 Hz INS, max. 20 Hz GNSS

Nagypontosságú oldalkúszási szög érzékelő
- Kistler Correvit S-HR

© 2024 HUN-REN SZTAKI. All Rights Reserved.