Experimental autonomous ground vehicles
Test vehicles
Practical validation of basic research results
- Model-based vehicle control
- Decision making and planning
- AI-based solutions
- Environmental perception
- Communication
Expansion of competences
- Test vehicle hardware and software
- Integrating test procedures into the research process
Education
Cooperation
- Two identical test vehicles
- Joint development
Communication of results
- Demonstrations
- Establishing relationships with industry partners
- Presentation of results to the general public


System architecture
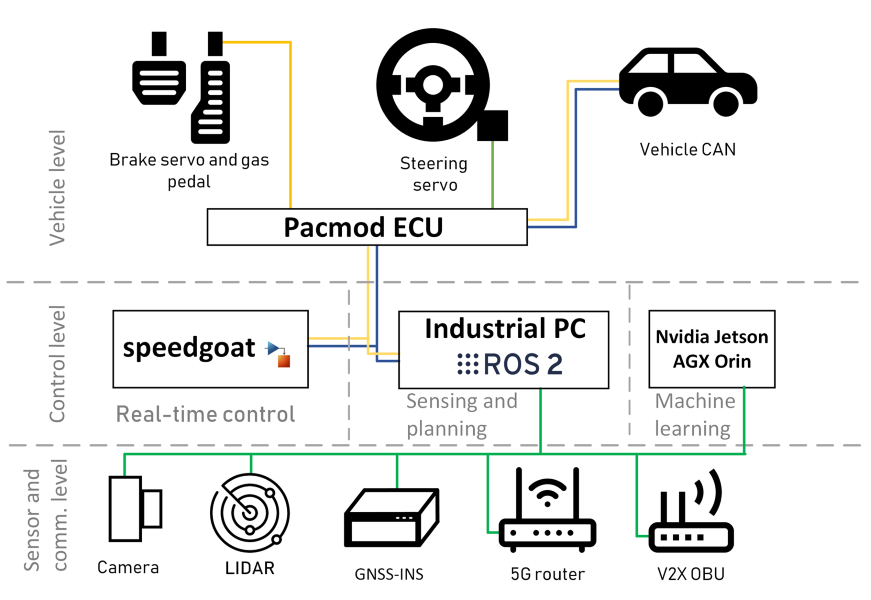
Sensors
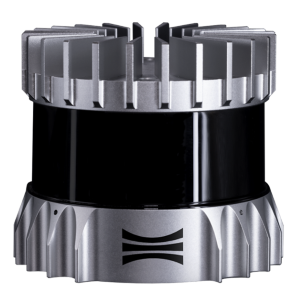
Ouster OS1-64 lidar
- 64 channels
- Viewing angle: 45 degrees vertical, 360 degrees horizontal
- Horizontal resolution:2048
- Range: 90 m (170 m)


Lucid Triton Camera
- 3.2 MP
- Sony IMX265
- Fujinon 12mm f/1.6

Novatel GNSS-INS
- Novatel PwrPak7D
- RTK 1cm position accuracy
- Position angle accuracy of 0.08 degrees
- USB, CAN, Ethernet
- Max. 200 Hz INS, max. 20 Hz GNSS

High precision side creep angle sensor
- Kistler Correvit S-HR

© 2024 HUN-REN SZTAKI. All Rights Reserved.